Overview
This experiment focused on making dense, stylized vegetation feel grounded in the real world instead of floating as a visual effect. The brief was simple: render a lot of grass on an iPad, keep it lit and reactive, and make it sit convincingly on top of scanned physical geometry.
Problem
Mobile AR has tight budgets for dense geometry, dynamic shading, and convincing world alignment.
Focus
Push visual density without giving up realtime responsiveness on iPad-class hardware.
Result
A grass system that sits in the room instead of looking pasted onto the camera feed.
Challenge
The hard part was balancing fidelity and performance. Thousands of individual blades create a much better illusion than billboard-style patches, but they also multiply draw cost quickly. On top of that, AR content only looks believable when it respects the surfaces and orientation of the scanned space.
Approach
I treated the piece as a rendering study instead of a placement demo. The visual target was lush, readable grass with enough directional variation to avoid visible repetition, while the technical target was stable performance on a mobile device.
Implementation
I used GPU instancing so each blade could render as a 3D object with dynamic lighting without blowing the iPad frame budget. LiDAR scan data handled surface alignment, which kept the grass tied to the physical room instead of hovering over the camera feed.
Image maps controlled blade direction, with alpha values determining the rotation of each “pixel” of grass. That gave the system an art-directable layer instead of locking the look to procedural noise.
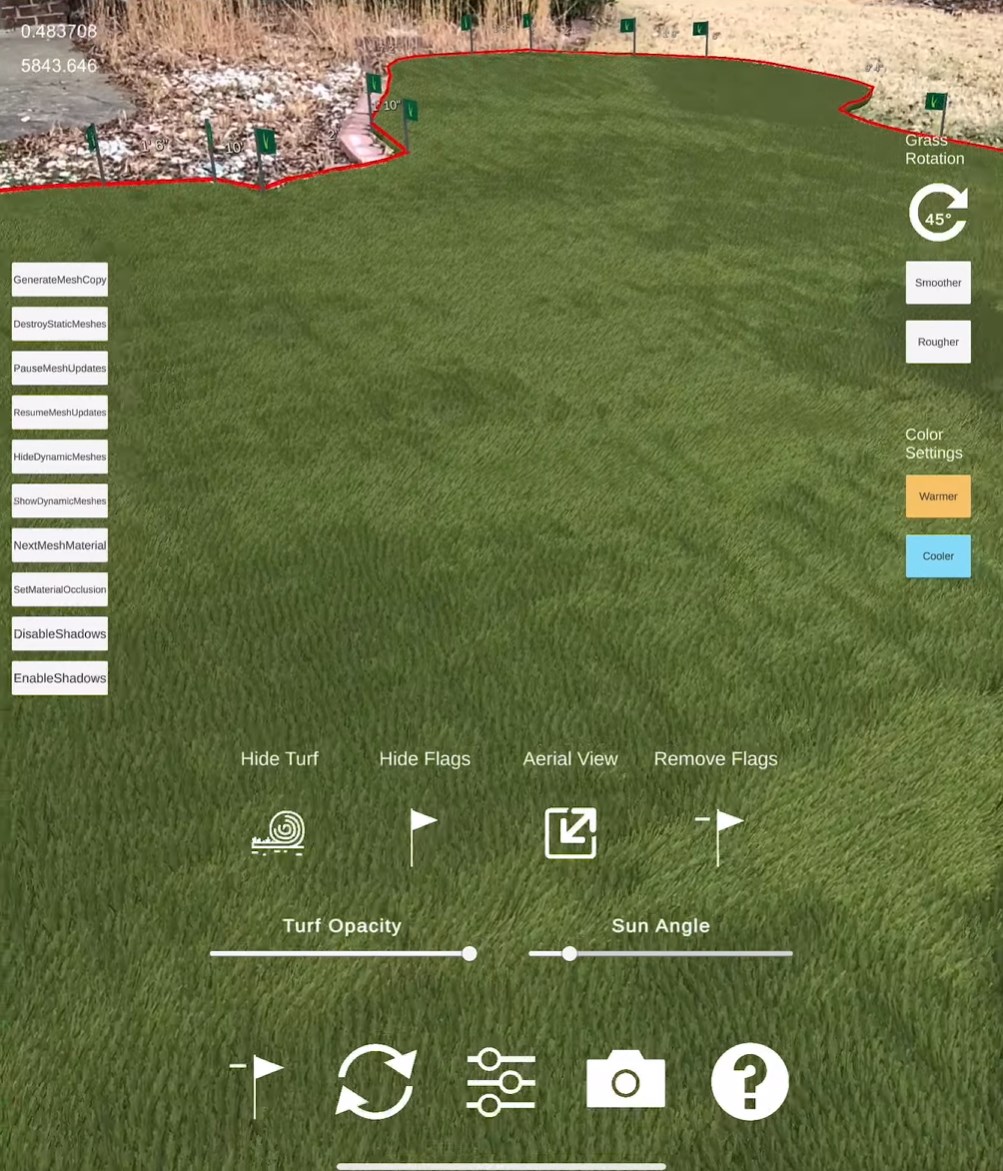
Media
The demo shows density and anchoring in motion. The realism comes from orientation, lighting, and placement staying disciplined together.
Outcome
The result is a practical mobile AR rendering pattern: use instancing where density matters, use LiDAR where grounding matters, and keep enough authored control in the pipeline to shape the final motion and patterning.